Seon Ki Park and Kelvin K. Droegemeier
Center for Analysis and Prediction of
Storms and School of Meteorology
University of Oklahoma, Norman, OK 73019
1. INTRODUCTION
Model parameters, both physical and computational, as well as initial and boundary conditions are essential factors in controlling the dynamical evolution of flows in atmospheric numerical models. For deep convective storms, their effects have been evaluated through the deterministic approach of sensitivity analysis (Park 1996), which employs a set of differential equations such as the tangent linear model (TLM) and the adjoint model (ADJM). Here, the sensitivity is defined as the gradient of the model response or output with respect to any input parameter.
Although having been used substantially for both sensitivity analysis and variational data assimilation in meteorology, the ADJM, especially of 3-D models, is still routinely generated by hand. The gradients can be computed efficiently and accurately by using automatic differentiation (AD) tools, which apply the chain rule systematically to elementary operations or functions to generate derivative codes of given nonlinear models. In this study, we apply a general purpose AD tool called ADIFOR (Automatic DIfferentiation of FORtran; Bischof et al. 1992) to the 3-D Advanced Regional Prediction System (ARPS; Xue et al. 1995) to generate a sensitivity-enhanced code (SE-ARPS) capable of providing derivatives of all model output variables and related diagnostic (derived) parameters (i.e., dependent variables; DV) as a function of specified control parameters, including initial and boundary conditions as well as physical and computational constants (i.e., independent variables; IV).
Given the strong influence that water vapor has on atmospheric processes,
particularly convective storms, we compute the sensitivity of model
outputs with respect to water vapor. We also compute sensitivities of the cost
function, which measures distance in the Euclidean norm between the observations
and model results, with respect to all model variables. Subsequently,
we discuss implications of the sensitivity results to data assimilation.
2. SENSITIVITY TO PERTURBATIONS
In 3-D models, the number of IVs is potentially very large when grid variables are considered, and this may inhibit the practical computation of sensitivity because of memory limitations. Although data assimilation requires the gradient of a cost function with respect to specified control parameters, we may need, in many forecasting problems, the sensitivities of model responses to perturbations only in specific regions. By introducing an artificial perturbation parameter, e, into ARPS, we let ADIFOR generate a sensitivity code that regards e as one of the IVs (Bischof et al. 1995).
For example, suppose the water vapor field, ![]() , is perturbed by a
factor e. Then any quantity P that is influenced by
, is perturbed by a
factor e. Then any quantity P that is influenced by ![]() implicitly depends upon e. Expanding P(e) in a Taylor series about the
reference state [P(e = 0)] and retaining only the first-order term, we
obtain an approximation to the sensitivity of P with respect to e:
implicitly depends upon e. Expanding P(e) in a Taylor series about the
reference state [P(e = 0)] and retaining only the first-order term, we
obtain an approximation to the sensitivity of P with respect to e:
![]()
Here, ![]() can be interpreted as the sensitivity of P to a uniform
fractional change in
can be interpreted as the sensitivity of P to a uniform
fractional change in ![]() . Accordingly, the relative sensitivity
coefficient (RSC) is defined as
. Accordingly, the relative sensitivity
coefficient (RSC) is defined as ![]() normalized by its nonlinear
counterparts (P/e) and
describes the percentage change in P due to a 1 % perturbation (e)
in
normalized by its nonlinear
counterparts (P/e) and
describes the percentage change in P due to a 1 % perturbation (e)
in ![]() (Park 1996).
(Park 1996).
Since the perturbation e is added to the input parameters, which
already have their own characteristic distribution in the
model domain, sensitivities
computed from this approach implicitly involve the characteristics of
those parameters. We limit our experiments only to ![]() at initial and
intermediate times excluding boundary conditions.
at initial and
intermediate times excluding boundary conditions.
3. MODEL, CONTROL SIMULATION AND TLM VALIDATION
We employ the full-physics ARPS (version 4.0), which is three dimensional,
fully compressible, and nonhydrostatic. The prognostic variables, solved on the
Arakawa C grid include Cartesian velocity components (u, v and w),
perturbations of potential temperature ( ![]() ) and pressure (p),
mixing ratios of water vapor (
) and pressure (p),
mixing ratios of water vapor ( ![]() ), cloud water (
), cloud water ( ![]() )
and rain water (
)
and rain water ( ![]() ), and turbulent kinetic energy.
An extensive description of the model can be
found in the ARPS user's guide (Xue et al. 1995).
), and turbulent kinetic energy.
An extensive description of the model can be
found in the ARPS user's guide (Xue et al. 1995).
The computational domain
consists of ![]() grids in the horizontal with a grid size of 1 km. In
the vertical, a stretched grid system is employed with 35 levels and a
resolution of 150 m near the ground and 850 m at the top.
The model is run for 140 min, with a large timestep of 6 sec and
a small timestep of 1 sec. The detailed model configuration for our
experiments is described in Park (1996).
grids in the horizontal with a grid size of 1 km. In
the vertical, a stretched grid system is employed with 35 levels and a
resolution of 150 m near the ground and 850 m at the top.
The model is run for 140 min, with a large timestep of 6 sec and
a small timestep of 1 sec. The detailed model configuration for our
experiments is described in Park (1996).
The simulation is made using the supercell HALF4 hodograph and thermodynamic
sounding from Droegemeier et al. (1993).
The simulated supercell develops rapidly during the first 30 minutes and
becomes quasi-steady thereafter, with a sustained updraft of around 47 m/s.
Major storm features including the surface outflow boundary (dotted lines)
are shown in Figure 1. The isolated supercell storm
becomes dominant after 60 min and travels southeastward along the
leading edge of the expanding cold pool.
A secondary storm develops northeast of the main storm after 100 min,
merging into the main storm by 140 min.
4. RESULTS AND DISCUSSION
We investigate the effect of perturbations in ![]() within four different
regions of the environment: (
within four different
regions of the environment: ( ![]() ) inside the rain region above
cloud base, (
) inside the rain region above
cloud base, ( ![]() ) in the ambient environment outside the rain region
and above cloud base, (
) in the ambient environment outside the rain region
and above cloud base, ( ![]() ) the updraft region (including w = 0)
in the subcloud layer, and (
) the updraft region (including w = 0)
in the subcloud layer, and ( ![]() ) the downdraft region in the subcloud layer.
) the downdraft region in the subcloud layer.
We run the SE-ARPS starting
at 90 min, when the supercell storm is fully mature (see Figure 1b).
The cloud base at 90 min is around 485 m. Three model levels are involved
in the subcloud layer. The numbers of
grid points involved in perturbation are 8280 for ![]() , 61720 for
, 61720 for ![]() ,
5972 for
,
5972 for ![]() , and 4028 for
, and 4028 for ![]() .
Among the many available results, we discuss the sensitivity of
vertical velocity (w), which is
an important parameter describing storm intensity.
.
Among the many available results, we discuss the sensitivity of
vertical velocity (w), which is
an important parameter describing storm intensity.
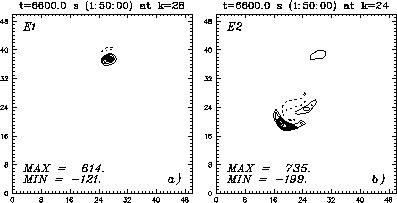
Figure 2 shows the domain maximum sensitivity of w at 110 min with respect
to perturbations ![]() and
and ![]() at 90 min.
At 110 min, in the control simulation, the main updraft is located near
the center of the domain with a lima-bean shape, while a prominent secondary
storm exists to the northeast. The sensitivities to
perturbations below cloud base (i.e.,
at 90 min.
At 110 min, in the control simulation, the main updraft is located near
the center of the domain with a lima-bean shape, while a prominent secondary
storm exists to the northeast. The sensitivities to
perturbations below cloud base (i.e., ![]() and
and ![]() ) are much smaller
than those above cloud base (i.e.,
) are much smaller
than those above cloud base (i.e., ![]() and
and ![]() ).
The location of the largest sensitivity differs for different
perturbations. The largest w sensitivity to the
).
The location of the largest sensitivity differs for different
perturbations. The largest w sensitivity to the ![]() perturbation occurs
in the secondary storm near the cloud top, while that to the
perturbation occurs
in the secondary storm near the cloud top, while that to the ![]() perturbation stays in the main storm at lower levels.
The maximum sensitivity value of 614 in Figure 2a implies a change of
w by 6.14 m s
perturbation stays in the main storm at lower levels.
The maximum sensitivity value of 614 in Figure 2a implies a change of
w by 6.14 m s ![]() due to a 1 % perturbation (
due to a 1 % perturbation ( ![]() ) in
) in ![]() .
For perturbations
.
For perturbations ![]() and
and ![]() , the largest sensitivity is observed at
both the main and secondary storms (not shown).
, the largest sensitivity is observed at
both the main and secondary storms (not shown).
 |
|
Figure 2:
Domain maximum sensitivity of w at t = 110 min with respect to
the |
We now discuss the sensitivity results in the cost function and their
implications on data assimilation. The cost function, J, is defined as
the squared distance between the model states, ![]() , and the corresponding
observations,
, and the corresponding
observations, ![]() :
:
![]()
where ![]() denotes a scalar product between
denotes a scalar product between
![]() and
and ![]() and n represents the time index.
and n represents the time index.
![]() is a weighting factor matrix as defined in Park (1996). Applying this
factor, the cost function is nondimensionalized and normalized at the
beginning of the variational data assimilation window.
Sensitivities of J are computed for perturbations in all
model variables both inside and outside the rain region of the storm.
is a weighting factor matrix as defined in Park (1996). Applying this
factor, the cost function is nondimensionalized and normalized at the
beginning of the variational data assimilation window.
Sensitivities of J are computed for perturbations in all
model variables both inside and outside the rain region of the storm.
We consider the control simulation as our pseudo-observations. The sensitivity period is 30 min, from t = 80 min to t = 110 min. A 1 % perturbation is added to all variables at all grid points at 80 min for the perturbation run, which serves as the nonlinear basic field for the sensitivity computation. With this perturbation, model solutions show little difference from the pseudo-observations.
For perturbations inside the rain region, the largest sensitivity
in the cost function (i.e., forecasting error) is due to variablity in
![]() , followed by p and
, followed by p and ![]() .
Among the moisture variables inside the cloud,
.
Among the moisture variables inside the cloud, ![]() exerts the largest
influence on J, followed by
exerts the largest
influence on J, followed by ![]() and
and ![]() .
Perturbations in the momentum
variables (u, v and w) inside the rain region yield small changes in J.
The sensitivities are generally smaller for perturbations outside the rain
region. The largest sensitivity is due to
.
Perturbations in the momentum
variables (u, v and w) inside the rain region yield small changes in J.
The sensitivities are generally smaller for perturbations outside the rain
region. The largest sensitivity is due to ![]() ,
followed by
,
followed by ![]() and p.
Since
and p.
Since ![]() and
and ![]() are effectively
zero in the ambient air, the sensitivities of J to them are extremely
small.
are effectively
zero in the ambient air, the sensitivities of J to them are extremely
small.
Figure 3 depicts the RSC of J with respect to ![]() and p
inside the rain region. The p field has the largest effect on J
during the early sensitivity period. This is because p is directly
responsible for the mass balance through pressure gradient forces
in the momentum equations. When p is perturbed, the flow
accelerates until terms involving the velocity become comparable with
the pressure gradient force. Therefore, the flow immediately and
significantly responds to the p perturbations. In contrast,
perturbations in
and p
inside the rain region. The p field has the largest effect on J
during the early sensitivity period. This is because p is directly
responsible for the mass balance through pressure gradient forces
in the momentum equations. When p is perturbed, the flow
accelerates until terms involving the velocity become comparable with
the pressure gradient force. Therefore, the flow immediately and
significantly responds to the p perturbations. In contrast,
perturbations in ![]() affect the system initially through only the buoyancy
term in the vertical momentum equation, and then other variables through mass
continuity. Hence, during the early
sensitivity period, the p perturbations exert the largest influence on
forecast errors among all variables. However, the increased buoyancy
through the
affect the system initially through only the buoyancy
term in the vertical momentum equation, and then other variables through mass
continuity. Hence, during the early
sensitivity period, the p perturbations exert the largest influence on
forecast errors among all variables. However, the increased buoyancy
through the ![]() perturbation eventually influences storm dynamics and
forecast error.
perturbation eventually influences storm dynamics and
forecast error.
|
|
Figure 3:
Relative sensitivities of cost function with respect to
perturbations in |
5. ACKNOWLEDGMENTS
This work was supported by the Center for Analysis
and Prediction of Storms under Grant ATM91-20009 from the National
Science Foundation (NSF) and by NSF Grant ATM92-22576 to the second author.
6. REFERENCES
Bischof, C., A. Carle, G. Corliss, A. Griewank, and P. Hovland, 1992: ADIFOR: Generating derivative codes from Fortran programs. Scientific Programming, 1, 11-29.
Bischof, C., G. Pusch, and R. Knoesel, 1995: Sensitivity analysis of the MM5 weather model using automatic differentiation. Preprint, MCS-P532-0895, Argonne National Laboratory, 14 pp.
Droegemeier, K.K., S.M. Lazarus, and R. Davies-Jones, 1993: The influence of helicity on numerically simulated convective storms. Mon. Wea. Rev., 121, 2005-2029.
Park, S.K., 1996: Sensitivity Analysis of Deep Convective Storms. Ph.D. thesis, School of Meteorology, University of Oklahoma, 245 pp.
Xue, M., K.K. Droegemeier, V. Wong, A. Shapiro, and K. Brewster, 1995: ARPS4.0 User's Guide. Center for Analysis and Prediction of Storms, University of Oklahoma, 380 pp.